Un sensor es un dispositivo capaz de detectar magnitudes físicas o
químicas, llamadas variables de instrumentación, y transformarlas en variables
eléctricas. Las variables de instrumentación pueden ser por ejemplo:
temperatura, intensidad lumínica, distancia, aceleración, inclinación,
desplazamiento, presión, fuerza, torsión, humedad, pH,
etc. Una magnitud eléctrica puede ser una resistencia eléctrica
(como en una RTD), una capacidad eléctrica (como
en un sensor de humedad), una Tensión eléctrica (como en
un termopar), una corriente eléctrica (como
en un fototransistor), etc.
El sensor está siempre en
contacto con la variable de instrumentación con lo que puede decirse también
que es un dispositivo que aprovecha una de sus propiedades con el fin de
adaptar la señal que mide para que la pueda interpretar otro dispositivo. Como
por ejemplo el termómetro de mercurio que aprovecha la
propiedad que posee el mercurio de dilatarse o contraerse por la acción de la
temperatura. Un sensor también puede decirse que es un dispositivo que
convierte una forma de energía en otra.
Estos dispositivos se pueden llamar elementos primarios, ya que se
encargan de sensar el valor de una variable dependiendo de lo que se
esté controlando.
Un sensor tiene las siguientes características:
1. Convierte una variable física (por
ejemplo, temperatura, distancia, presión) en otra variable diferente,
generalmente en una señal eléctrica.
2. Son codificadores (Encoders), efectores, convertidores, detectores, transductores e iniciadores.
3. No siempre generan una señal eléctrica. Ejemplo. Los finales de carrera neumáticos, generan cambios de presión.
4. Funcionan con contacto físico y sin
contacto físico. Ejemplos, finales de carrera, sensores de
fuerza(contacto físico), barreras fotoeléctricas, barreras de aire,
detectores de infrarrojos, sensores de reflexión ultrasónicos, sensores
magnéticos(sin contacto físico).
5. En procesos controlados, son
“preceptores” que supervisan un proceso, indicando los errores,
recogiendo los estados y transmitiendo esta información a los demás
componentes del proceso.
Tipos de Sensores
Existen
diferentes tipos de sensores, en función del tipo de variable
que tengan que medir o detectar:
-
De
contacto.
-
Ópticos.
-
Térmicos.
-
De
humedad.
-
Magnéticos.
-
De
infrarrojos.
Sensores de Contacto
Se
emplean para detectar el final del recorrido o la posición límite
de componentes mecánicos. Por ejemplo: saber cuando una puerta
o una ventana que se abren automáticamente están ya completamente
abiertas y por lo tanto el motor que las acciona debe pararse.
Los principales son los llamados fines
de carrera (o finales de carrera). Se trata de un interruptor
que consta de una pequeña pieza móvil y de una pieza fija que
se llama NA, normalmente abierto, o NC, normalmente cerrado.
La
pieza NA está separada de la móvil y sólo hace contacto cuando
el componente mecánico llega al final de su recorrido y acciona
la pieza móvil haciendo que pase la corriente por el circuito
de control.
La pieza NC
hace contacto con la móvil y sólo se separa cuando el componente
mecánico llega al final de su recorrido y acciona la pieza móvil
impidiendo el paso de la corriente por el circuito de control.
Según el tipo de fin de carrera, puede haber una pieza NA, una
NC o ambas.
Usos: se usan para detectar obstáculos mediante contacto directo. Sin embargo, no son sensores
de contacto adecuados para robots de alta velocidad, ya que cuando se detecta el obstáculo gracias al bumper, el robot no tiene tiempo de frenar.
Sensores ópticos
Detectan
la presencia de una persona o de un objeto que interrumpen el
haz de luz que le llega al sensor.
|
Los principales sensores ópticos son
las fotorresistencias, las LDR. |
Recordemos
que se trataba de resistencias cuyo valor disminuía con la luz,
de forma que cuando reciben un haz de luz permiten el paso de
la corriente eléctrica por el circuito de control. Cuando una
persona o un obstáculo interrumpen el paso de la luz, la LDR aumenta
su resistencia e interrumpe el paso de corriente por el circuito
de control.
Las
LDR son muy útiles en robótica para regular el movimiento de los
robots y detener su movimiento cuando van a tropezar con un obstáculo
o bien disparar alguna alarma. También sirven para regular la
iluminación artificial en función de la luz natural.
El
circuito que aparece en la imagen superior derecha nos permitiría
controlar la puesta en marcha de una alarma al disminuir la intensidad
luminosa que incide sobre un LDR.
Usos:
En el Mouse de computadora, los cuales mueven el cursor según el movimiento que le indicamosrealizar. No obstante es importante tener en cuenta que los sensores ópticos también puedenutilizarse para leer y detectar información, tal como al velocidad de un auto que viene por la carretera y si un billete grande esta marcado o bien, es falso. Las cámaras digitales y devideo utilizan sensores ópticos (lentes) para poder captar las imágenes que van a capturar
Sensores de Temperatura
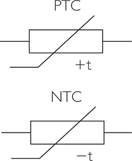
Los termistores son los principales sensores
de temperatura. |
Se trata de resistencias cuyo valor asciende
con la temperatura (termistor PTC) o bien disminuye con la temperatura
(termistor NTC).
Por lo tanto, depende de la temperatura que
el termistor permita o no el paso de la corriente por el circuito
de control del sistema.
El
símbolo y la apariencia de un termistor es:
Usos:
El sensor de temperatura puede usarse para
compensar un dispositivo de medida sensible a la temperatura ambiente,
refrigerar partes delicadas del robot o bien para loggear temperaturas en el
transcurso de un trayecto de exploración.
Sensores de Humedad
Se
basan en que el agua no es
un material aislante como el aire sino que tiene una conductividad
eléctrica; por esa razón el Reglamento de Baja Tensión prohíbe
la presencia de tomas de corriente próximas a la bañera, como
veíamos en el tema anterior.
Por
lo tanto un par de cables eléctricos desnudos (sin cinta aislante
recubriéndolos) van a conducir una pequeña cantidad de corriente
si el ambiente es húmedo; si colocamos un transistor en zona activa
que amplifique esta corriente tenemos un detector de humedad.
Se
representan con este símbolo:
Usos: Los sensores de humedad se aplican para detectar el nivel de
líquido en un depósito, o en sistemas de riego de jardines
para detectar cuándo las plantas necesitan riego y cuándo no.
Sensores Magnéticos
Detecta
los campos magnéticos que provocan los imanes o las corrientes
eléctricas. El principal es el llamado interruptor Reed;
consiste en un par de láminas metálicas de materiales ferromagnéticos
metidas en el interior de una cápsula que se atraen en presencia
de un campo magnético, cerrando el circuito.
Su
símbolo recuerda vagamente al del interruptor convencional:
Usos: El
interruptor Reed puede sustituir a los finales de carrera para
detectar la posición de un elemento móvil, con la ventaja de que
no necesita ser empujado físicamente por dicho elemento sino que
puede detectar la proximidad sin contacto directo. Esto es muy
útil cuando interesa evitar el contacto físico, por ejemplo para
detectar el nivel de agua de un depósito sin riesgo de cortocircuitos.
Sensores Infrarrojos
Si
recordamos el espectro electromagnético estudiado en un tema anterior,
existía una franja de ondas electromagnéticas cuya frecuencia
es muy baja para que nuestros ojos la detecten; son los infrarrojos.
Existen diodos capaces de emitir luz infrarroja
y transistores sensibles a este tipo de ondas y que por lo tanto
detectan las emisiones de los diodos. Esta es la base del funcionamiento
de los mandos a distancia; el mando contiene diodos que emiten
infrarrojos que son recibidos por los fototransistores del aparato.
Los
diodos de infrarrojos son a simple vista idénticos a los LED,
como se puede apreciar en la imagen, y se representan de la misma
manera, mientras que el símbolo de los fototransistores es semejante
al de los transistores normales pero añadiendo las flechas que
representan la luz que reciben. Recordemos que las flechas salen
del elemento cuando éste emite luz o radiación infrarroja y entran
en él cuando el elemento recibe dicha radiación.















{kind=link}